nemu 基础与 nemu/gem5 difftest
主要是想了解 nemu 的基本原理以及和 gem5 的 difftest.
difftest with gem5
在与 gem5 进行 difftest 的时候,nemu 会打包成共享库。gem5 会在运行的时候加载共享库,然后调用其中的函数进行 difftest.
difftest.c 中包含了 5 个头文件:
#include <isa.h> // isa 相关的信息,与 isa 相关的函数定义
#include <memory/paddr.h> // 模拟器内存空间相关的定义
#include <memory/sparseram.h> // sparse 内存模型的支持
#include <cpu/cpu.h> // cpu 内部的状态,异常的支持
#include <difftest.h> // 所用寄存器的字节计算在 gem5 中使用到了几个函数.
difftest_init
调用了 isa_init 和 mem_init。实际上就是初始化了内存状态和体系结构状态。对于内存而言,其只是调用了 paddr.c 中的allocate_memory_with_mmap 函数,来为单个硬件线程分配所有的物理内存空间,对于 nemu 的虚拟 cpu 这就是其物理内存,而这是通过 mmap 映射到我们本机的虚拟内存上的。
然后就是 isa_init 初始化体系结构寄存器状态。
void init_isa() {
// NEMU has some cached states and some static variables in the source code.
// They are assumed to have initialized states every time when the dynamic lib is loaded.
// However, if we link NEMU as a static library, we have to manually initialize them.
// 设置第二次调用标志,第二次调用的时候不重置 csr
static bool is_second_call = false;
if (is_second_call) {
memset(csr_array, 0, sizeof(csr_array));
}
// 这里其实就是给某类 csr 进行标记,表示当前某类 csr 寄存器是不是存在
// 如果开启了 H 拓展,H 模式被设置为 0
init_csr();
#ifndef CONFIG_RESET_FROM_MMIO
cpu.pc = RESET_VECTOR;
#else
// 在 difftest 下 pc 的恢复地址被设置成这个地址
// 这个地址具体是什么尚不明确
cpu.pc = CONFIG_MMIO_RESET_VECTOR;
#endif
// lr/sc 相关的
cpu.lr_valid = 0;
// 0 号寄存器设置成0
cpu.gpr[0]._64 = 0;
// 工作在 m 态
cpu.mode = MODE_M;
// For RV64 systems, the SXL and UXL fields are WARL fields that
// control the value of XLEN for S-mode and U-mode, respectively.
// For RV64 systems, if S-mode is not supported, then SXL is hardwired to zero.
// For RV64 systems, if U-mode is not supported, then UXL is hardwired to zero.
// 设置 mstatus 的 val,暂时不明确含义
mstatus->val = 0xaUL << 32;
// initialize the value fs and vs to 0
// 设置浮点和向量寄存器的保存状态
mstatus->fs = 0;
mstatus->vs = 0;
// initialize SDT, MDT
// m态下的可重入中断相关,需要拓展支持
mstatus->mdt = ISDEF(CONFIG_RV_SMDBLTRP);
#ifdef CONFIG_RV_SSDBLTRP
mstatus->sdt = 0;
vsstatus->sdt = 0;
menvcfg->dte = 1;
henvcfg->dte = 1;
#endif //CONFIG_RV_SSDBLTRP
#ifdef CONFIG_RV_SMRNMI
// mnstatus->nmie = 0;
// as opensbi and linux not support smrnmi, so we init nmie = 1 to pass ci
mnstatus->nmie = 1;
#endif //CONFIG_RV_SMRNMI
#ifdef CONFIG_RV_SSTC
menvcfg->stce = 1;
stimecmp->val = 0xffffffffffffffffULL;
#ifdef CONFIG_RVH
henvcfg->stce = 1;
vstimecmp->val = 0xffffffffffffffffULL;
#endif
#endif
#ifdef CONFIG_RV_SVPBMT
menvcfg->pbmte = 0;
henvcfg->pbmte = 0;
#endif //CONFIG_RV_SVPBMT
#ifdef CONFIG_RV_CBO
menvcfg->cbze = 1;
menvcfg->cbcfe = 1;
menvcfg->cbie = 3;
senvcfg->cbze = 1;
senvcfg->cbcfe = 1;
senvcfg->cbie = 3;
#ifdef CONFIG_RVH
henvcfg->cbze = 1;
henvcfg->cbcfe = 1;
henvcfg->cbie = 3;
#endif
#endif
#ifdef CONFIG_RV_PMP_ENTRY_16
// 开启物理内存保护的支持
pmpcfg0->val = 0;
pmpcfg2->val = 0;
#endif // CONFIG_RV_PMP_ENTRY_16
#ifdef CONFIG_RV_PMP_ENTRY_64
pmpcfg0->val = 0;
pmpcfg2->val = 0;
pmpcfg4->val = 0;
pmpcfg6->val = 0;
pmpcfg8->val = 0;
pmpcfg10->val = 0;
pmpcfg12->val = 0;
pmpcfg14->val = 0;
#endif // CONFIG_RV_PMP_ENTRY_64
#define ext(e) (1 << ((e) - 'a'))
// 设置当前处理器开启了哪些拓展
misa->extensions = ext('i') | ext('m') | ext('a') | ext('c') | ext('s') | ext('u');
#ifndef CONFIG_FPU_NONE
misa->extensions |= ext('d') | ext('f');
#endif // CONFIG_FPU_NONE
#ifdef CONFIG_RVH
misa->extensions |= ext('h');
hstatus->vsxl = 2; // equal to max len (spike)
vsstatus->val = mstatus->val & SSTATUS_RMASK;
mideleg->val |= ((1 << 12) | (1 << 10) | (1 << 6) | (1 << 2));
#endif // CONFIG_RVH
#ifdef CONFIG_RVB
misa->extensions |= ext('b');
#endif // CONFIG_RVB
#ifdef CONFIG_RV_IMSIC
miselect->val = 0;
siselect->val = 0;
vsiselect->val = 0;
mireg->val = 0;
sireg->val = 0;
vsireg->val = 0;
mtopi->val = 0;
stopi->val = 0;
vstopi->val = 0;
mvien->val = 0;
mvip->val = 0;
hvien->val = 0;
hvictl->val = 0;
hviprio1->val = 0;
hviprio2->val = 0;
mtopei->val = 0;
stopei->val = 0;
vstopei->val = 0;
#endif // CONFIG_RV_IMSIC
// xlen 为 64
misa->mxl = 2; // XLEN = 64
#ifdef CONFIG_RVV
// vector
misa->extensions |= ext('v');
// 用于动态设置访问向量寄存器
vl->val = 0;
// 设置 vill
vtype->val = (uint64_t) 1 << 63; // actually should be 1 << 63 (set vill bit to forbidd)
// 以字节为单位表示向量的最大长度
vlenb->val = VLEN/8;
#endif // CONFIG_RVV
// mcycle and minstret record :
// - the difference between the absolute number and the write value, when the bit of mcountinhibit is clear;
// - the inhibited number, when the bit of mcountinhibit is set.
// 机器计数器相关
mcycle->val = 0;
minstret->val = 0;
#ifdef CONFIG_RV_CSR_MCOUNTINHIBIT
mcountinhibit->val = 0;
#endif // CONFIG_RV_CSR_MCOUNTINHIBIT
// All hpm counters are read-only zero in NEMU
// 清空硬件性能参数相关的
MAP(CSRS_UNPRIV_HPMCOUNTER, CSR_ZERO_INIT);
MAP(CSRS_M_HPMCOUNTER, CSR_ZERO_INIT);
MAP(CSRS_M_HPMEVENT, CSR_ZERO_INIT);
// 封装机器信息的 csr 的设置
// 这是 xiangshan 独有的信息设置
#ifdef CONFIG_USE_XS_ARCH_CSRS
mvendorid->val = 0;
marchid->val = 25;
mimpid->val = 0;
#else
mvendorid->val = CONFIG_MVENDORID_VALUE;
marchid->val = CONFIG_MARCHID_VALUE;
mimpid->val = CONFIG_MIMPID_VALUE;
#endif // CONFIG_USE_XS_ARCH_CSRS
#ifdef CONFIG_RV_SDTRIG
init_trigger();
#endif // CONFIG_RV_SDTRIG
#define MSTATEEN0_RESET 0xdc00000000000001ULL
#define HSTATEEN0_RESET 0xdc00000000000001ULL
#define SSTATEEN0_RESET 0x0000000000000001ULL
#ifdef CONFIG_RV_SMSTATEEN
mstateen0->val = MSTATEEN0_RESET;
hstateen0->val = HSTATEEN0_RESET;
sstateen0->val = SSTATEEN0_RESET;
#endif // CONFIG_RV_SMSTATEEN
#ifndef CONFIG_SHARE
extern char *cpt_file;
extern bool checkpoint_restoring;
if (cpt_file == NULL && !checkpoint_restoring) {
#ifdef CONFIG_USE_SPARSEMM
sparse_mem_write(get_sparsemm(), RESET_VECTOR, sizeof(img), img);
#else
memcpy(guest_to_host(RESET_VECTOR), img, sizeof(img));
#endif
}
#endif
#if defined(CONFIG_LIGHTQS) || !defined(CONFIG_SHARE)
init_clint();
#endif
if (!is_second_call) {
// 共享库情况下的第一次调用 init_device
// 其实就是对设备的寄存器进行初始化
IFDEF(CONFIG_SHARE, init_device());
}
#ifndef CONFIG_SHARE
Log("NEMU will start from pc 0x%lx", cpu.pc);
#endif
// 将当前 csr 的状态拷贝到 cpu 这个数据结构中
csr_prepare();
// 表示第一次的调用已经完成,接下来的话就是第二次的调用
is_second_call = true;
}difftest_get_backed_memory
调用这个函数能将备用的内存恢复到 nemu 中。
difftest_memcpy
一个 difftest 的 memcpy 的封装实现,调用这个接口可以把数据往虚拟机的内存拷贝。
difftest_regcpy
调用这个接口,可以从 gem5 把数据恢复到 nemu 的寄存器中,csr mmu 也同步更新。
difftest_csrcpy
同样的调用这个接口数字恢复到 csr 中。
difftest_uarchstatus_cpy
用于建立微体系结构的同步状态(LL/SC)。
difftest_exec
调用这个接口告知 nemu 向下执行 n 条指令,在编译成动态库的情况下 n 条指令一条一条执行。
difftest_guided_exec
执行一条指令,执行的时候附带从 gem5 传过来的中断等信息。
update_dynamic_config
从外部传递一些信息,动态的改变配置。
difftest_store_commit
将 nemu queue 中维护的 store queue 的头部返回。返回为 1 代表数据结构正确返回了,返回为 0 代表没有正确返回。
difftest_raise_intr
传入一个中断号,进行中断的处理。变更 nemu 内部的一些机器状态,并把中断入口的地址传给 nemu.
isa_reg_display
打印出 nemu 中所有的寄存器状态.
difftest_query_ref
将内存访问的结果拷贝回给入的指针中。
检查点生成
检查点生成对应于 simpoint 的 profiling/checkpoint 过程,主要使用了 zlib 来压缩机器状态。
对于给定参数的解析放在 monitor 的 parse_arg,直接对着表找参数就行了,参数的命令都比较浅显,这里我想注意的是 -r 参数,也就是 restorer 的参数,这个参数造成的影响就是把恢复程序赋值给 restorer。同时由于传入了 simpoint profiling 参数,某个变量标记当前处在 simpoint 的模式下。
void init_monitor(int argc, char *argv[]) {
/* Perform some global initialization. */
/* Parse arguments. */
#ifdef CONFIG_MODE_USER
int user_argidx = parse_args(argc, argv);
#else
// 解析参数
parse_args(argc, argv);
#endif
/* Open the log file. */
init_log(log_file, fast_log, small_log);
if (warmup_interval == 0) {
warmup_interval = checkpoint_interval;
}
if (map_image_as_output_cpt) {
// 这个暂时没有设置过
assert(!mapped_cpt_file);
mapped_cpt_file = img_file;
checkpoint_restoring = true;
}
extern void init_path_manager();
extern void simpoint_init();
extern void init_serializer();
//checkpoint and profiling set output
bool output_features_enabled = checkpoint_state != NoCheckpoint || profiling_state == SimpointProfiling;
if (output_features_enabled) {
// 初始化路径管理器
init_path_manager();
// 创建输出文件名
simpoint_init();
// 序列化管理者 也是checkpoint 的创造者
init_serializer();
}
/* Initialize memory. */
// 启示就是分配本机的虚拟内存空间代表虚拟机的物理内存
init_mem();
/* Load the image to memory. This will overwrite the built-in image. */
// 用户态,暂时没用过
#ifdef CONFIG_MODE_USER
int user_argc = argc - user_argidx;
char **user_argv = argv + user_argidx;
void init_user(char *elfpath, int argc, char *argv[]);
init_user(img_file, user_argc, user_argv);
#else
/* Perform ISA dependent initialization. */
// 初始化 isa 相关的状态,注意这里初始化了刚开始的 pc
init_isa();
int64_t img_size = 0;
// img_file 就是
assert(img_file);
// 设定 bbl_start 为 RESET_VECTOR,注意 cpu.pc 也是这个值
// paddr.h #define RESET_VECTOR (CONFIG_MBASE + CONFIG_PC_RESET_OFFSET)
// 0x80000000 0(暂时设计为 0)
uint64_t bbl_start = RESET_VECTOR;
// 如果给出了 restorer
if (restorer) {
// 开始处加上这一段偏移(0x100000)
bbl_start += CONFIG_BBL_OFFSET_WITH_CPT;
}
// 将传入的镜像 opensbi + linux 加载到 bbl_start 这个内存地址
img_size = load_img(img_file, "image (checkpoint/bare metal app/bbl) form cmdline", bbl_start, 0);
// 如果传入了 restorer
if (restorer) {
FILE *restore_fp = fopen(restorer, "rb");
Assert(restore_fp, "Can not open '%s'", restorer);
int restore_size = 0;
int restore_jmp_inst = 0;
int ret = fread(&restore_jmp_inst, sizeof(int), 1, restore_fp);
assert(ret == 1);
assert(restore_jmp_inst != 0);
ret = fread(&restore_size, sizeof(int), 1, restore_fp);
assert(ret == 1);
assert(restore_size != 0);
fclose(restore_fp);
// 前面进行一系列的检查,保证 restore 的完好
// 这里被加载到 reset vector
load_img(restorer, "Gcpt restorer form cmdline", RESET_VECTOR, restore_size);
}
/* Initialize differential testing. */
// 在 生成 checkpoint 的时候这个函数无效
init_difftest(diff_so_file, img_size, difftest_port);
/* Initialize devices. */
// 初始化各种 外设
init_device();
#endif
/* Compile the regular expressions. */
// 这是为执行引擎做的工作
init_regex();
/* Initialize the watchpoint pool. */
// 这像是进行内部调试的时候有用的功能
// 可能和 gdb 的 watch point 类似
init_wp_pool();
/* Enable alignment checking for in a x86 host */
init_aligncheck();
/* Display welcome message. */
// 打印欢迎信息
welcome();
}这里面还涉及到两点,都是有关内存布局的,一个是客户机物理内存的分配,另一个是序列化工具的初始化。
内存分配
即上面看到的 initmem 函数。其实际调用的是 allocate_memory_with_mmap,
void allocate_memory_with_mmap()
{
#ifdef CONFIG_USE_MMAP
// Note: we are using MAP_FIXED here, in the SHARED mode, even if
// init_mem may be called multiple times, the memory space will be
// allocated only once at the first time called.
// See https://man7.org/linux/man-pages/man2/mmap.2.html for details.
void *pmem_base = (void *)(PMEMBASE + PMEM_HARTID * MEMORY_SIZE);
void *ret = mmap(pmem_base, MEMORY_SIZE, PROT_READ | PROT_WRITE,
MAP_ANONYMOUS | MAP_PRIVATE | MAP_FIXED | MAP_NORESERVE, -1, 0);
if (ret != pmem_base) {
perror("mmap");
assert(0);
}
pmem = (uint8_t*)ret;
#endif // CONFIG_USE_MMAP
}根据这里可以发现,客户机的内存基地址为 PMEMBASE + PMEM_HARTID * MEMORY_SIZE,根据设定 PMEMBASE 为 0x80000000,PMEM_HARTID 对于单个核来说为 0,MEMORY_SIZE 为 2G 大小。随后就进行了 mmap 的分配,在以 pmem_base 为开始,分配出了 2G 的内存,这个分配出的虚拟机物理内存被记录到 pmem 上。由于设置了 MAP_FIXED,这个起始地址一定会被映射到当前进程的 0x80000000 这个地址上,否则就会报错。
序列化初始化
序列化器的实现实现在文件 src/checkpoints/serializer.c 中。
序列化器的构造函数如下:
Serializer::Serializer() :
IntRegStartAddr(INT_REG_CPT_ADDR-BOOT_CODE),
IntRegDoneFlag(INT_REG_DONE-BOOT_CODE),
FloatRegStartAddr(FLOAT_REG_CPT_ADDR-BOOT_CODE),
FloatRegDoneFlag(FLOAT_REG_DONE-BOOT_CODE),
CSRStartAddr(CSR_REG_CPT_ADDR-BOOT_CODE),
CSRSDoneFlag(CSR_REG_DONE-BOOT_CODE),
VecRegStartAddr(VECTOR_REG_CPT_ADDR-BOOT_CODE),
VecRegDoneFlag(VECTOR_REG_DONE-BOOT_CODE),
CptFlagAddr(BOOT_FLAG_ADDR-BOOT_CODE),
PCAddr(PC_CPT_ADDR-BOOT_CODE),
MODEAddr(MODE_CPT_ADDR-BOOT_CODE),
MTIMEAddr(MTIME_CPT_ADDR-BOOT_CODE),
MTIMECMPAddr(MTIME_CMP_CPT_ADDR-BOOT_CODE),
MISCDoneFlag(MISC_DONE_CPT_ADDR-BOOT_CODE)
{
}BOOT_CODE 在宏定义中被定义为 0x80000000,为整体虚拟机物理内存的开始点。剩下的都是在计算寄存器与基地址之间的偏移。
在序列化也就是产生 checkpoint 的时候调用的是 c 接口:
bool try_take_cpt(uint64_t icount) {
if (serializer.instrsCouldTakeCpt(icount)) {
serializer.serialize(icount);
serializer.notify_taken(icount);
Log("return true");
return true;
}
return false;
}这里面核心的是序列化函数:
void Serializer::serialize(uint64_t inst_count) {
#ifdef CONFIG_MEM_COMPRESS
serializeRegs();
serializePMem(inst_count);
#else
xpanic("You should enable CONFIG_MEM_COMPRESS in menuconfig");
#endif
}可以看到这很像是把寄存器序列化到虚拟机的内存中,在把虚拟机内存打包序列化。
首先看 serializeRegs,可以看到就是对各种寄存器进行序列化:
void Serializer::serializeRegs() {
// 记录通用寄存器到相关的地址中
auto *intRegCpt = (uint64_t *) (get_pmem() + IntRegStartAddr);
for (unsigned i = 0; i < 32; i++) {
*(intRegCpt + i) = cpu.gpr[i]._64;
}
Log("Writing int registers to checkpoint memory @[0x%x, 0x%x) [0x%x, 0x%x)", INT_REG_CPT_ADDR,
INT_REG_CPT_ADDR + 32 * 8, IntRegStartAddr, IntRegStartAddr + 32 * 8);
#ifndef CONFIG_FPU_NONE
auto *floatRegCpt = (uint64_t *)(get_pmem() + FloatRegStartAddr);
for (unsigned i = 0; i < 32; i++) {
*(floatRegCpt + i) = cpu.fpr[i]._64;
}
Log("Writing float registers to checkpoint memory @[0x%x, 0x%x) [0x%x, 0x%x)", FLOAT_REG_CPT_ADDR,
FLOAT_REG_CPT_ADDR + 32 * 8, FloatRegStartAddr, FloatRegStartAddr + 32 * 8);
#endif // CONFIG_FPU_NONE
#ifdef CONFIG_RVV
auto *vectorRegCpt = (uint64_t *) (get_pmem() + VecRegStartAddr);
for (unsigned i = 0; i < 32; i++) {
for (unsigned j = 0; j < VENUM64; j++) {
*(vectorRegCpt + (i * VENUM64) + j)=cpu.vr[i]._64[j];
}
}
Log("Writing Vector registers to checkpoint memory @[0x%x, 0x%x) [0x%x, 0x%x)",
FLOAT_REG_CPT_ADDR, FLOAT_REG_CPT_ADDR + 32 * 8,
VecRegStartAddr, VecRegStartAddr + 32 * 8 * VENUM64
);
#endif // CONFIG_RVV
// 记录 pc 到相关的地址中
auto *pc = (uint64_t *) (get_pmem() + PCAddr);
*pc = cpu.pc;
Log("Writing PC: 0x%lx at addr 0x%x", cpu.pc, PC_CPT_ADDR);
// csr_writeback();
auto *csrCpt = (uint64_t *)(get_pmem() + CSRStartAddr);
// Log("csrCpt: %p\n",csrCpt);
// Log("Mstatus: 0x%x", mstatus->val);
// Log("CSR array mstatus: 0x%x", csr_array[0x300]);
for (unsigned i = 0; i < 4096; i++) {
rtlreg_t val = csr_array[i];
if ((void *)mip == (void *)&csr_array[i]) {
mip_t mip_tmp = *mip;
if (mip_tmp.mtip) {
mip_tmp.mtip = 0;
}
// Log("Saving mip: 0x%x", mip_tmp.val);
// 如果当前有计时器中断,清空掉,然后再保存
val = mip_tmp.val;
}
*(csrCpt + i) = val;
if (csr_array[i] != 0) {
Log("CSR 0x%x: 0x%lx", i, *(csrCpt + i));
}
}
//prepare mstatus
// 单独设置机器状态
mstatus_t *mstatus_prepare=(mstatus_t *)&csrCpt[0x300];
mstatus_prepare->mpie=mstatus_prepare->mie;
mstatus_prepare->mie=0;
mstatus_prepare->mpp=cpu.mode;
#ifdef CONFIG_RVH
// checkpoint ub: mpp = 3, mpv = 1
mstatus_prepare->mpv=cpu.v;
#endif
//prepare mepc
// 单独设置异常返回地址
mepc_t *mepc_prepare=(mepc_t*)&csrCpt[0x341];
mepc_prepare->val=cpu.pc;
Log("Writing CSR to checkpoint memory @[0x%x, 0x%x) [0x%x, 0x%x)",
CSR_REG_CPT_ADDR, CSR_REG_CPT_ADDR + 4096 * 8,
CSRStartAddr, CSRStartAddr + 4096 * 8
);
// 记录魔数到内存中
auto *flag = (uint64_t *)(get_pmem() + CptFlagAddr);
*flag = CPT_MAGIC_BUMBER;
Log("Touching Flag: 0x%x at addr 0x%x", CPT_MAGIC_BUMBER, BOOT_FLAG_ADDR);
// 记录当前 cpu 模式到虚拟机物理内存中
auto *mode_flag = (uint64_t *) (get_pmem() + MODEAddr);
*mode_flag = cpu.mode;
Log("Record mode flag: 0x%lx at addr 0x%x", cpu.mode, MODE_CPT_ADDR);
auto *mtime = (uint64_t *) (get_pmem() + MTIMEAddr);
extern word_t paddr_read(paddr_t addr, int len, int type, int mode, vaddr_t vaddr);
*mtime = ::paddr_read(CLINT_MMIO+0xBFF8, 8, MEM_TYPE_READ, MEM_TYPE_READ, MODE_M, CLINT_MMIO+0xBFF8);
Log("Record time: 0x%lx at addr 0x%x", cpu.mode, MTIME_CPT_ADDR);
auto *mtime_cmp = (uint64_t *) (get_pmem() + MTIMECMPAddr);
*mtime_cmp = ::paddr_read(CLINT_MMIO+0x4000, 8, MEM_TYPE_READ, MEM_TYPE_READ, MODE_M, CLINT_MMIO+0x4000);
Log("Record time: 0x%lx at addr 0x%x", cpu.mode, MTIME_CMP_CPT_ADDR);
regDumped = true;
}注意这些保存的位置举例物理内存开始的偏移是自己设置的。
然后调用内存序列化参数:
void Serializer::serializePMem(uint64_t inst_count) {
// We must dump registers before memory to store them in the Generic Arch CPT
assert(regDumped);
const size_t PMEM_SIZE = MEMORY_SIZE;
uint8_t *pmem = get_pmem();
if (restorer) {
FILE *restore_fp = fopen(restorer, "rb");
if (!restore_fp) {
xpanic("Cannot open restorer %s\n", restorer);
}
uint32_t restorer_size = 0xf00;
fseek(restore_fp, 0, SEEK_SET);
assert(restorer_size == fread(pmem, 1, restorer_size, restore_fp));
fclose(restore_fp);
Log("Put gcpt restorer %s to start of pmem", restorer);
}
string filepath;
if (checkpoint_state == SimpointCheckpointing) {
filepath = pathManager.getOutputPath() + "_" + to_string(simpoint2Weights.begin()->first) + "_" +
to_string(simpoint2Weights.begin()->second);
} else {
filepath = pathManager.getOutputPath() + "_" + to_string(inst_count);
}
if (compress_file_format == GZ_FORMAT) {
filepath += "_.gz";
gzFile compressed_mem = gzopen(filepath.c_str(), "wb");
if (compressed_mem == nullptr) {
cerr << "Failed to open " << filepath << endl;
xpanic("Can't open physical memory checkpoint file!\n");
} else {
cout << "Opening " << filepath << " as checkpoint output file" << endl;
}
uint64_t pass_size = 0;
for (uint64_t written = 0; written < PMEM_SIZE; written += pass_size) {
pass_size = numeric_limits<int>::max() < ((int64_t)PMEM_SIZE - (int64_t)written)
? numeric_limits<int>::max()
: ((int64_t)PMEM_SIZE - (int64_t)written);
if (gzwrite(compressed_mem, pmem + written, (uint32_t)pass_size) != (int)pass_size) {
xpanic("Write failed on physical memory checkpoint file\n");
}
Log("Written 0x%lx bytes\n", pass_size);
}
if (gzclose(compressed_mem)) {
xpanic("Close failed on physical memory checkpoint file\n");
}
} else if (compress_file_format == ZSTD_FORMAT) {
filepath += "_.zstd";
// zstd compress
size_t const compress_buffer_size = ZSTD_compressBound(PMEM_SIZE);
void *const compress_buffer = malloc(compress_buffer_size);
assert(compress_buffer);
size_t const compress_size = ZSTD_compress(compress_buffer, compress_buffer_size, pmem, PMEM_SIZE, 1);
assert(compress_size <= compress_buffer_size && compress_size != 0);
FILE *compress_file = fopen(filepath.c_str(), "wb");
size_t fw_size = fwrite(compress_buffer, 1, compress_size, compress_file);
if (fw_size != (size_t)compress_size) {
free(compress_buffer);
xpanic("file write error: %s : %s \n", filepath.c_str(), strerror(errno));
}
if (fclose(compress_file)) {
free(compress_buffer);
xpanic("file close error: %s : %s \n", filepath.c_str(), strerror(errno));
}
free(compress_buffer);
} else {
xpanic("You need to specify the compress file format using: --checkpoint-format\n");
}
Log("Checkpoint done!\n");
regDumped = false;
}看着一大段其实很简单,直接就把内存压缩着往里面写就完成了。
这就是序列化初始化的过程,在 profiling 的过程中其实只是生成了 bbv,生成 checkpoint 还是要在 checkpoint 阶段才对。
内存布局
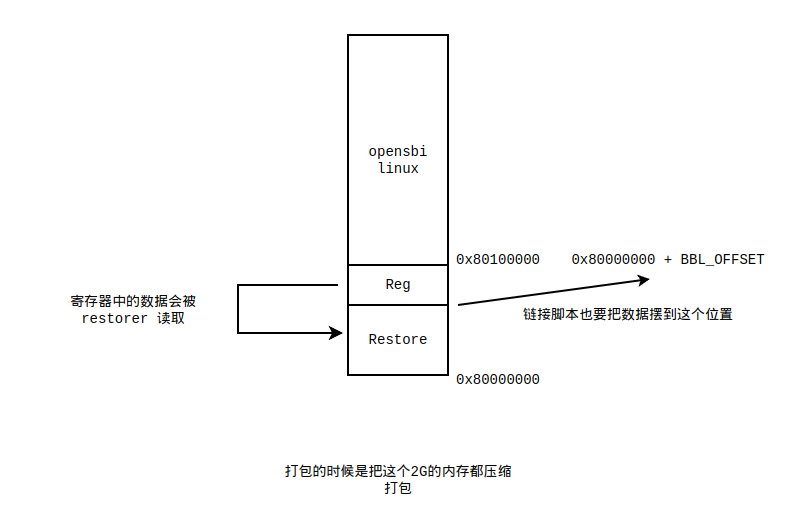
需要注意的有几点:
- 恢复的位置都对齐到一个点:gcpt 链接脚本,nemu,gem5,设备树。
- 注意兼容性,不同版本 nemu 的检查点可能不兼容,因为新版本可能先加了csr,但是老版本还没有,于是读到个不存在的 csr 值,造成错误。同理对应于 gem5。
- 根据产生 difftest 产生错误的内存地址推测错误的发生。
- 不是从检查点恢复的时候,pc 从 membase + BBL_OFFSET 开始执行。
从检查点加载
直接镜像读到内存里面从 restore 开始恢复就行了。gem5 也是同理的,这个镜像作为裸机程序被加载,地址设置到 restore 处,直接开始执行就行了。restore 会自动进行状态的恢复。
太累了,写不动了。