Weak simpoint support in gem5
本文主要讲解 gem5 中对 simpoibt 的支持。gem5 中能够使用 simpoint,但是只能在运行 AtomicSimpleCPU 时候才能进行对 simpoint 的数据采集,根据 simpoint 的理论,对于 AtomicSimpleCPU 采集的信息严格上来说并不能用于其他类型的 cpu,而对于 AtomicSimpleCPU 的探索往往又是很有限的,因此称这种 simpoint的支持为薄弱的支持。
这里简单的解析下 gem5 中生成 simpoint 所需的基本块(bb)信息的原理。
基于 gem5 的 simpoint 加速模拟过程
基于 gem5 的 simpoint 加速分析过程如下图所示:
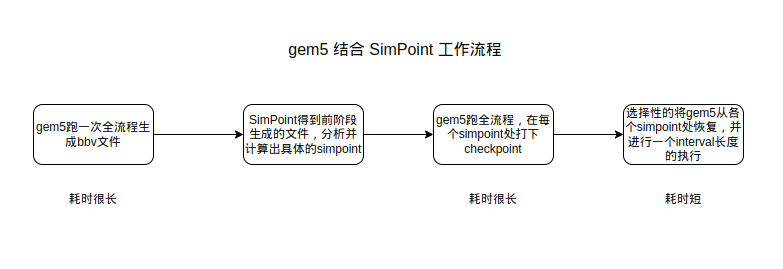
从图中可以看到,整个流程中对于 gem5 全流程的运行至少需要两次,这对于简单的 AtomicSimpleCPU 来说可能都需要耗费十几个小时以上的时间,假如其支持了乱序,这个时间更可能是用天来计算了。这可能也是 gem5 并不支持乱序的 cpu simpoint的原因,一是信息的采集可能本身就比较难,而是即使采集到了信息,还要跑一次全流程的模拟打下 simpoint,耗时非常的久,所以干脆就不支持了。
基于 gem5 的 simpoint 的 bb 信息采集原理
bb format
采集到的 bb 信息是要拿给 SimPoint 做分析的,SimPoint 自然有它接受的 bbv 的格式,这里首先介绍这种块的格式。
典型的格式为:
T:45:1024 :189:99343
T:11:78573 :15:1353 :56:1
T:18:45 :12:135353 :56:78 314:4324263即以 T 开头,后续向量中的所有表示为:id:time,其中id是可以区别各个 bb 的 id,具体怎么取由 bbv 的生成者决定;time 即是在这个基本块中消耗的时间。整个 bbv 中各个 :id:time 之间使用空格做分隔。这就是 bbv 的格式。
采集流程
生成 bbv 的过程需要获取到 cpu 中的信息,这依靠 gem5 的检测系统,有关监测系统的介绍在监测系统文章中有过详细的介绍。下面直接将 simpoint 的监听回调函数(SimPoint::profile)是怎么实现的。
首先需要知道的是这个回调在什么时候被调用:
fault = curStaticInst->execute(&t_info, traceData);
// keep an instruction count
if (fault == NoFault) {
countInst();
ppCommit->notify(std::make_pair(thread, curStaticInst));
} else if (traceData) {
traceFault();
}这段代码是在 AtomicSimpleCPU::tick()中的,也就是说只要指令执行成功,probepoint 就会通知监听器触发回调函数。
以下解释回调函数:
SimpleThread* thread = p.first;
const StaticInstPtr &inst = p.second;
if (inst->isMicroop() && !inst->isLastMicroop())
return;
if (!currentBBVInstCount)
currentBBV.first = thread->pcState().instAddr();
++intervalCount;
++currentBBVInstCount;第一个 if 的判断是对当前指令是否是微指令的判断,如果当前的指令是微指令就不做记录,也就是说对于 CISC 而言,对待其和 RISC 没什么区别。随后进行的是 currentBBVInstCount 是否为 0 的判断, 这个数值为 0 代表了一个新的基本块的开始。随后对 intervalCount 进行自增,这是因为在 AtomicSimpleCPU 不管什么指令的执行都只需要一个时钟周期,因此没执行一套指令时钟间隔书加1。currentBBVInstCount自增的意义就不必多说了。
if (inst->isControl()) {
currentBBV.second = thread->pcState().instAddr();
auto map_itr = bbMap.find(currentBBV);
if (map_itr == bbMap.end()){
BBInfo info;
info.id = bbMap.size() + 1;
info.insts = currentBBVInstCount;
info.count = currentBBVInstCount;
bbMap.insert(std::make_pair(currentBBV, info));
} else {
BBInfo& info = map_itr->second;
info.count += currentBBVInstCount;
}
currentBBVInstCount = 0;
if (intervalCount + intervalDrift >= intervalSize) {
// ...
}
}随后对指令的类型进行判断,如果当前的指令是控制指令,则代表一个基本块的结束,需要创建或者更新基本块的信息,并判断时间间隔是不是已经达到了预先设定的时间间隔,如果达到了时间间隔,则需要将基本块的信息导出到 bbv 中。
进入这个判断语句的开始就是将 currentBBV.second 设置成当前指令的地址,这样 currentBBV 这个结构就构成了 (begin_pc, end_pc),代表了一个基本块爱的范围,随后将这个基本块的信息作为 key 在 map 中进行搜索。如果先前已经记录过这个基本块了,直接更新基本块的相关性信息就行了;如果之前没记录过这个基本块,就要创建这个基本块的信息并插入到 map 中。后续将 currentBBVInstCount 清 0,代表一个新的基本快的开始。
if (inst->isControl()) {
// ...
if (intervalCount + intervalDrift >= intervalSize) {
// summarize interval and display BBV info
std::vector<std::pair<uint64_t, uint64_t> > counts;
for (auto map_itr = bbMap.begin(); map_itr != bbMap.end();
++map_itr) {
BBInfo& info = map_itr->second;
if (info.count != 0) {
counts.push_back(std::make_pair(info.id, info.count));
info.count = 0;
}
}
std::sort(counts.begin(), counts.end());
// Print output BBV info
*simpointStream->stream() << "T";
for (auto cnt_itr = counts.begin(); cnt_itr != counts.end();
++cnt_itr) {
*simpointStream->stream() << ":" << cnt_itr->first
<< ":" << cnt_itr->second << " ";
}
*simpointStream->stream() << "\n";
intervalDrift = (intervalCount + intervalDrift) - intervalSize;
intervalCount = 0;
}
}随后的判断 intervalCount + intervalDrift >= intervalSize 是在进行时间是否到达 interval 的判断。这里第一眼非常奇怪的可能是 intervalDrift 这个变量,考虑这样的场景,在最初的执行中,当前 intervalCount 的大小已经达到 intervalSize - 2,intervalDrift还是 0,在这一轮中显然还不满足这个判断条件,由于不满足条件,马上就进入到了第二个基本块中,假设第二个基本块消耗了 40 个 interval,显然,再进入到这个 if 判断的时候条件已经满足了,但是还超出了 38 个事件间隔,这 38 个时间间隔需要被记录下来,不能白白浪费掉不做记录,于是这部分超出的就被记录到 intervalDrift 中。
随后这个 if 中的操作就比较简单了,即从 map 中取出所有基本块信息,记录完成之后将这一轮基本快的信息清 0,将信息输出到文件,重置 intervalCount 和计算 intervalDrift。
以上就是生成 bbv 的过程了。
gem5 中 simpoint 的缺陷
- 如上文所说。
intervalSize参数不能设置的太小,不然一个基本块运行的时间大小很可能是好几个intervalSize,会漏记录一些信息。- 某种程度上的信息不准确。考虑这种情况,考虑
intervalSize为 1000,而第一个基本快的大小达到 999,同时第二个基本块的大小达到999,这样两个基本块的信息都被记录到生成的 bbv 中,随后 map 被清空,假设再来一个大小为 2 的基本快,它生成 bbv 的时候 map 中几乎是没有信息的,这是因为他的有一部分信息实际上被前面的基本块抢走了。